I modelli come questo a quattro rotori sono detti quadrirotori o quadricotteri.
Questo modello è il frutto del lavoro degli stesse persone che hanno sviluppato la scheda X-3D. (vedi sezione X-UFO)
Su questo modello gli sviluppatori sono partiti da zero e hanno sviluppato una nuova elettronica.
Ho seguito l'evoluzione del modello fin da quando ne sono apparsi i primi modelli non ancora in vendita al pubblico.
Poi è stata aggiunta una scheda detta X-ACC la quale permette al modello di auto livellarsi in assetto parallelo al terreno.
Nei video dimostrativi di questa nuova opzione la trasmittente viene letteralmente "abbandonata" sul pavimento e due ragazzi si passano il modello in volo.
Questa opzione è molto interessante per le riprese video aggiunta al fatto che il modello è attrezzato con motori brushless che gli permettono una capacità di carico molto superiore a quella dell'X-UFO.
Il modello viene fornito in kit da assemblare. Ci sono alcune saldature da eseguire anche sulla scheda principale detta X-BASE ma se si ha già fatto alcune saldature a stagno non ci sono particolari difficoltà. (in tutto le saldature sono 22)
Il mio progetto è quello di equipaggiare il modello con una telecamera come questa:
Le sue caratteristiche principali sono:
Compattezza:L. 61 x A. 93,7 x P. 30,3mm
Leggerezza: solo 150 grammi di peso
Resistenza agli urti: resistente all'acqua
Registra in formato MPEG4 su SDcard in qualità DVD
Zoom 10x
Ho tradotto il manuale dell'X-3D-BL e lo trovate QUI (clik con tasto destro e seleziona salva destinazione con nome)
Trovate QUI una sintesi di come si costruisce un X-3D-BL.
Il modello da solo pesa 425gr con batteria Li-Po da 1500mAh.
Nella foto sopra vedete un test con zavorra da 200gr per vedere se il modello è adatto a sollevare la telecamera sopracitata. La zavorra è composta da microcamera wireless con batteria di alimentazione e carrello in tubo d'alluminio.
Peso totale nel test 600gr!!!
Test superato a pieni voti.
Prossimo passo TELECAMERA!
Aggiornamento del 25/02/2008
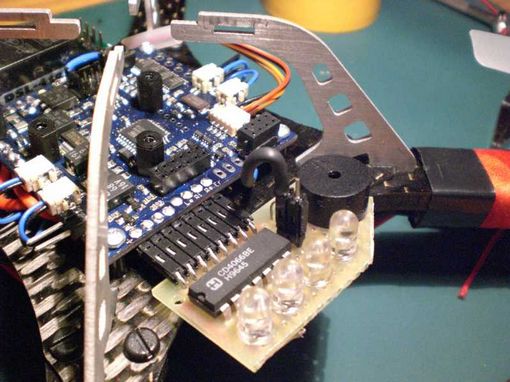
Sull'X-3D-BL l'unico modo per capire se la batteria sta per scaricarsi è guardare i led di navigazione. Questi led non vengono forniti nel kit e l'installazione è a cura dell'utente.
In ogni caso i led si vedono bene di notte e non di giorno in pieno sole.
Serviva un circuito di segnalazione acustico.
Il vantaggio di avere un segnalatore acustico di batteria scarica è duplice.
Ti permette di atterrare prima che il modello precipiti e preserva da una scarica eccessiva la batteria.
Infatti le batterie Li-Po sono molto sensibili alle scariche eccessive al punto che possono smettere di funzionare.
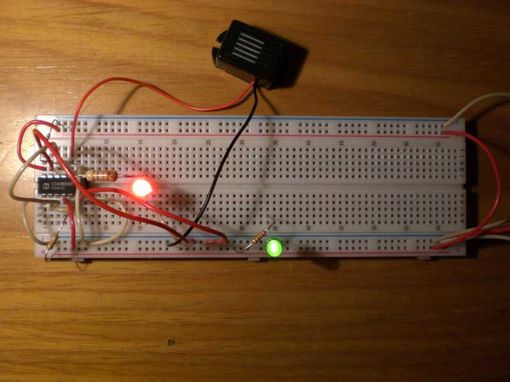
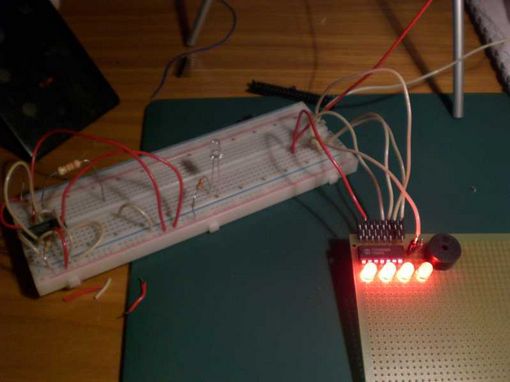
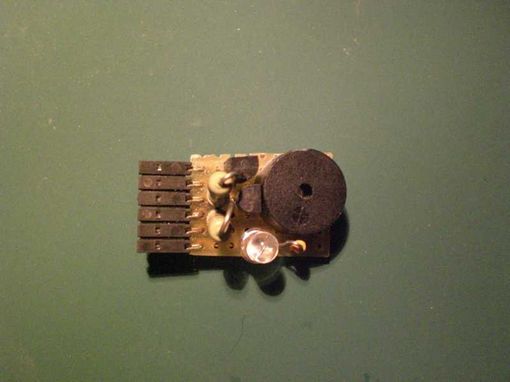
Su internet si trovano varie soluzioni per costruire il cicalino.
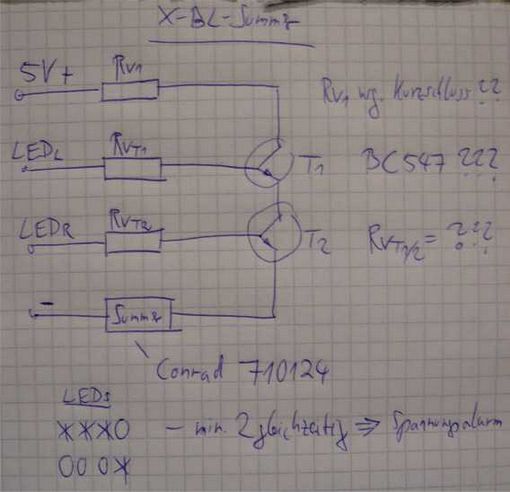
Ecco il circuito proposto da Iltuomaestro (un utente del forum baronerosso)
Guarda QUI il Risultato del primo test all'esterno (i contorni seghettati nel video originale non si vedono, il video mostrato è solo un esempio del risultato)
Come mi auguravo non c'è nessun problema a sollevare questa telecamera.
Con una scheda SD da 1Gb si registrano 30' in qualita DVD 720x576. Più che sufficienti per il mio scopo.
Il carrello è stato definito anche se vorrei rendere più pratico lo smontaggio.
07/04/2008
Ormai ho fatto più di qualche test di volo: con vento, facendo passaggi rapidi, salendo velocemente... Tutto OK!
Non mi resta che costruire una cassettina per portarmi dietro l'x-3d-bl senza danneggiarlo nel trasporto...
Intanto vedete il mio ultimo test di volo: clicca QUI
23/04/2008
Oggi sono arrivate le nuove eliche che ho ordinato da Ckado.com
L'idea di sostituirle a quelle originali mi è stata suggerita dagli altri utenti del forum. In effetti rispetto a quelle originali sono meno flessibili ma più precise nel disegno.
Anche dal punto di vita estetico sono più belle perchè nere come il telaio dell'ufo con le estremità dipinte.
A differenza di come le hanno montate gli altri io vorrei montarle sotto al telaio dell'ufo facendole diventare spingenti anzichè traenti.
Le eliche non vanno bene così come sono poichè hanno il foro centrale da 4mm sotto e sopra il foro si riduce a 2 mm.
Ho allargato il foro superiore fino a portarlo al diametro di 4mm come sotto.
Come si vede nella foto sotto l'asse dell'elica è troppo lungo così ho accorciato il mozzo dell'elica fino ad un'altezza complessiva di 6mm altrimenti non ci stava il dado per fissarla sul motore.
I motori Hacker del X-3D-BL hanno l'asse di diametro 3mm perciò per montare le eliche bisogna costruire una boccola.
Va bene qualsiasi tubo abbia un diametro esterno da 4 ed interno da 3.
Personalmente ho usato canna per aria compressa diametro esterno 4 interno 2.
Ho passato una punta da tre all'interno della boccola e siccome è elastica ho lavorato l'esterno fino ad ottenere l'inserimento sia sull'asse del motore che sull'elica con un pò di interferenza.
Nella foto sotto il risultato
Con queste eliche e nella configurazione della foto sopra l'X-3D-BL fa hovering per 13 minuti con la Li-Po da 1500mAh
Preparazione del modello per l'FPV (21/10/2008)
L'FPV è un sistema di pilotaggio degli aeromodelli tramite una telecamera montata a bordo che invia il segnale ad uno schermo od a un paio di occhiali video!
La mia idea? Fare riprese video dall'alto usando questo sistema. <<Ecco come>>
Raduni aeromodellistici
Frequentando il forum x-ufo su Baronerosso.net ho conosciuto altre persone interessate ai quadrirotori e alle riprese aeree.
Alcune di queste persone, in particolare Gibon e Biv2533, hanno creato dei raduni presso i loro campi di volo per trovarsi e scambiarci opinioni sui modelli e sugli allestimenti per le riprese video FPV
Se con l'accelerometro attivato notate ancora che il modello tende a spostarsi in una direzione, è il caso di eseguire una calibrazione più adatta al vostro X-3D-BL.